Obstacle Avoiding Robot using PIC Microcontroller
Materials Required:
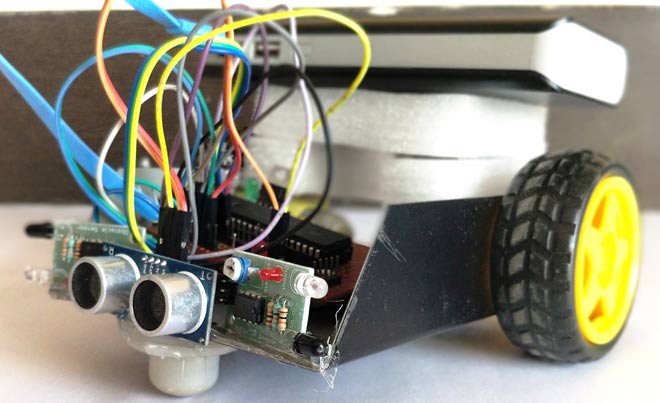
- PIC16F877A
- IR Sensor (2Nos)
- Ultrasonic Sensor (1Nos)
- DC Gear Motor (2Nos)
- L293D Motor Driver
- Chaises (You can also build your own using cardboards)
- Power bank (Any available power source)
Project Code
/*
Obstacle avoider using PIC16F877A
* Code by: B.Aswinth Raj
* Dated: 03-10-2017
* More details at: www.CircuitDigest.com
*/
Obstacle avoider using PIC16F877A
* Code by: B.Aswinth Raj
* Dated: 03-10-2017
* More details at: www.CircuitDigest.com
*/
#include <xc.h>
#pragma config FOSC = HS // Oscillator Selection bits (HS oscillator)
#pragma config WDTE = OFF // Watchdog Timer Enable bit (WDT disabled)
#pragma config PWRTE = ON // Power-up Timer Enable bit (PWRT enabled)
#pragma config BOREN = ON // Brown-out Reset Enable bit (BOR enabled)
#pragma config LVP = OFF // Low-Voltage (Single-Supply) In-Circuit Serial Programming Enable bit (RB3 is digital I/O, HV on MCLR must be used for programming)
#pragma config CPD = OFF // Data EEPROM Memory Code Protection bit (Data EEPROM code protection off)
#pragma config WRT = OFF // Flash Program Memory Write Enable bits (Write protection off; all program memory may be written to by EECON control)
#pragma config CP = OFF // Flash Program Memory Code Protection bit (Code protection off)
#pragma config WDTE = OFF // Watchdog Timer Enable bit (WDT disabled)
#pragma config PWRTE = ON // Power-up Timer Enable bit (PWRT enabled)
#pragma config BOREN = ON // Brown-out Reset Enable bit (BOR enabled)
#pragma config LVP = OFF // Low-Voltage (Single-Supply) In-Circuit Serial Programming Enable bit (RB3 is digital I/O, HV on MCLR must be used for programming)
#pragma config CPD = OFF // Data EEPROM Memory Code Protection bit (Data EEPROM code protection off)
#pragma config WRT = OFF // Flash Program Memory Write Enable bits (Write protection off; all program memory may be written to by EECON control)
#pragma config CP = OFF // Flash Program Memory Code Protection bit (Code protection off)
#define _XTAL_FREQ 20000000
#define Trigger RB1 //34 is Trigger
#define Echo RB2//35 is Echo
#define Trigger RB1 //34 is Trigger
#define Echo RB2//35 is Echo
int time_taken;
int distance;
int distance;
void back_off() //used to drive the robot backward
{
RC4=1; RC5=0; //Motor 1 reverse
RC6=0; RC7=1; //Motor 2 reverse
__delay_ms(1000);
}
void calculate_distance() //function to calculate distance of US
{
TMR1H =0; TMR1L =0; //clear the timer bits
Trigger = 1;
__delay_us(10);
Trigger = 0;
while (Echo==0);
TMR1ON = 1;
while (Echo==1);
TMR1ON = 0;
time_taken = (TMR1L | (TMR1H<<8));
distance= (0.0272*time_taken)/2;
}
void main()
{
TRISD = 0x00; //PORTD declared as output for interfacing LCD
TRISB1 = 0; //Trigger pin of US sensor is sent as output pin
TRISB2 = 1; //Echo pin of US sensor is set as input pin
TRISB3 = 0; //RB3 is output pin for LED
TRISD2 = 1; TRISD3 = 1; //Both the IR sensor pins are declared as input
TRISC4 = 0; TRISC5 = 0; //Motor 1 pins declared as output
TRISC6 = 0; TRISC7 = 0; //Motor 2 pins declared as output
T1CON=0x20;
while(1)
{
calculate_distance();
if (distance>5)
{
RC4=0; RC5=1; //Motor 1 forward
RC6=1; RC7=0; //Motor 2 forward
}
calculate_distance();
if (RD2==0 && RD3==1 && distance<=5) //Left sensor is blocked
{
back_off();
RC4=1; RC5=1; //Motor 1 stop
RC6=1; RC7=0; //Motor 2 forward
__delay_ms(500);
}
calculate_distance();
if (RD2==1 && RD3==0 && distance<=5) //Right sensor is blocked
{
back_off();
RC4=0; RC5=1; //Motor 1 forward
RC6=1; RC7=1; //Motor 2 stop
__delay_ms(500);
}
calculate_distance();
if (RD2==0 && RD3==0 && distance<=5)//Both sensor is open
{
back_off();
RC4=0; RC5=1; //Motor 1 forward
RC6=1; RC7=1; //Motor 2 stop
__delay_ms(500);
}
calculate_distance();
if (RD2==1 && RD3==1 && distance<=5)//Both sensor is blocked
{
back_off();
RC4=1; RC5=0; //Motor 1 reverse
RC6=1; RC7=1; //Motor 2 stop
__delay_ms(1000);
}
}
}




ไม่มีความคิดเห็น:
แสดงความคิดเห็น